Master Thesis (ongoing)
Project Proposal (short version)
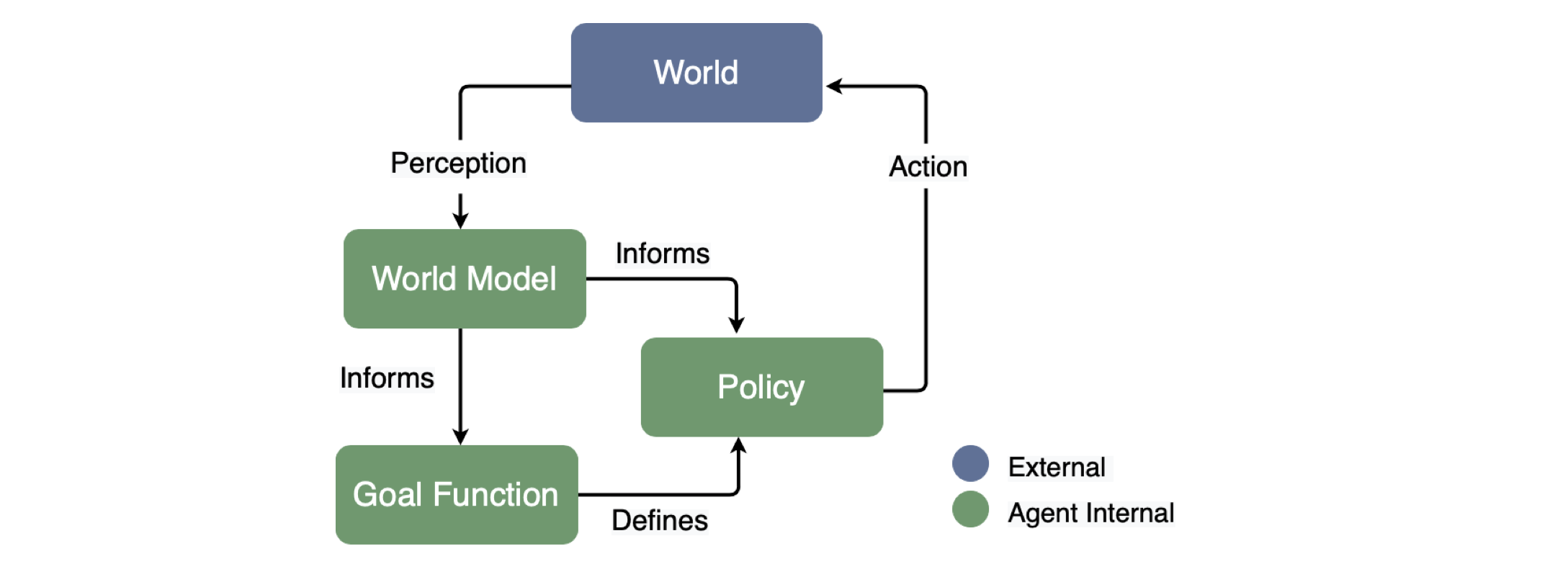
Current robotic systems need to be endowed with a specific goal function to act successfully. Humans are intrinsically motivated, behaving in a goal-driven manner from data within our environment alone. The goal of this research project is to bridge the gap between active inference and world model learning and to move towards robotic systems that can navigate complex environments in a more human-like manner.
Active inference has the advantage of casting otherwise external re- wards as internal prior probabilities. This circumvents the exploration- exploitation trade-off to a certain degree. Additionally, active inference is biologically plausible, which makes it a suitable goal function. World model learning, on the other hand, allows to build sample efficient agents that can plan future actions using acquired latent space representations.
As a key milestone, we aim at utilizing the developed agent in a rich high-dimensional environment. We expect the obtained agent to make more uncertainty-aware decisions during planning and navigation. To achieve our goal our project builds on substantial experience within both world model learning and deep active inference. We plan on working on the project during the next 9-12 months. We will start by looking into low dimensional tasks to apply our newly developed agent in. At a later project phase, we hope to apply our model in more demanding, high-dimensional and more complex environments. We aim at a publication within upcoming top tier conferences, we will build all model pipelines using Tensorflow 2.0, and we aim at open sourcing our results afterwards.