Neuromorphic Active Inference Agents (2020|21)
Content
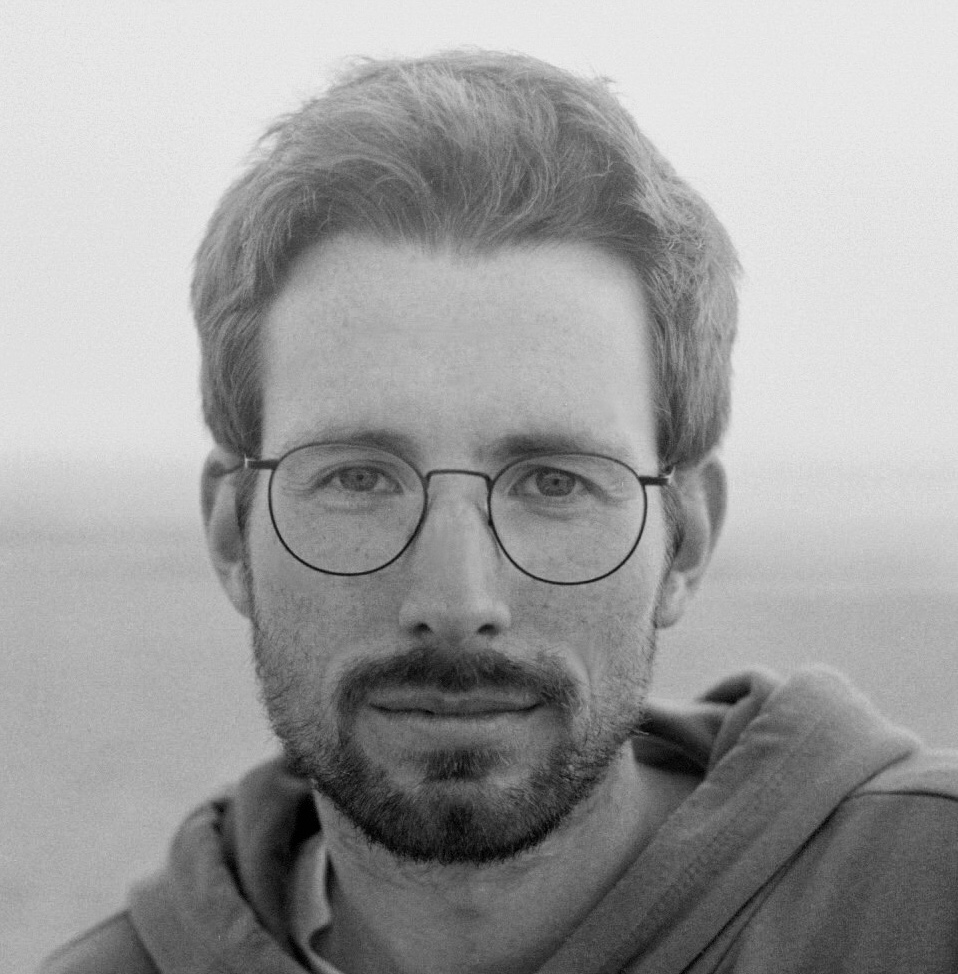
In this work we combined artificial perception and action with neuromorphic, biologically inspired hardware and software. Our primary goal was to create a simple agent that perceives and acts on a basic environment using a free-energy inspired approach implemented using a spiking neural network architecture. To tackle the problem, we split our implementations and worked both on a low-level predictive coding approach and a more high-level Braitenberg active inference model. The architectures that we applied are shown in the figures below:
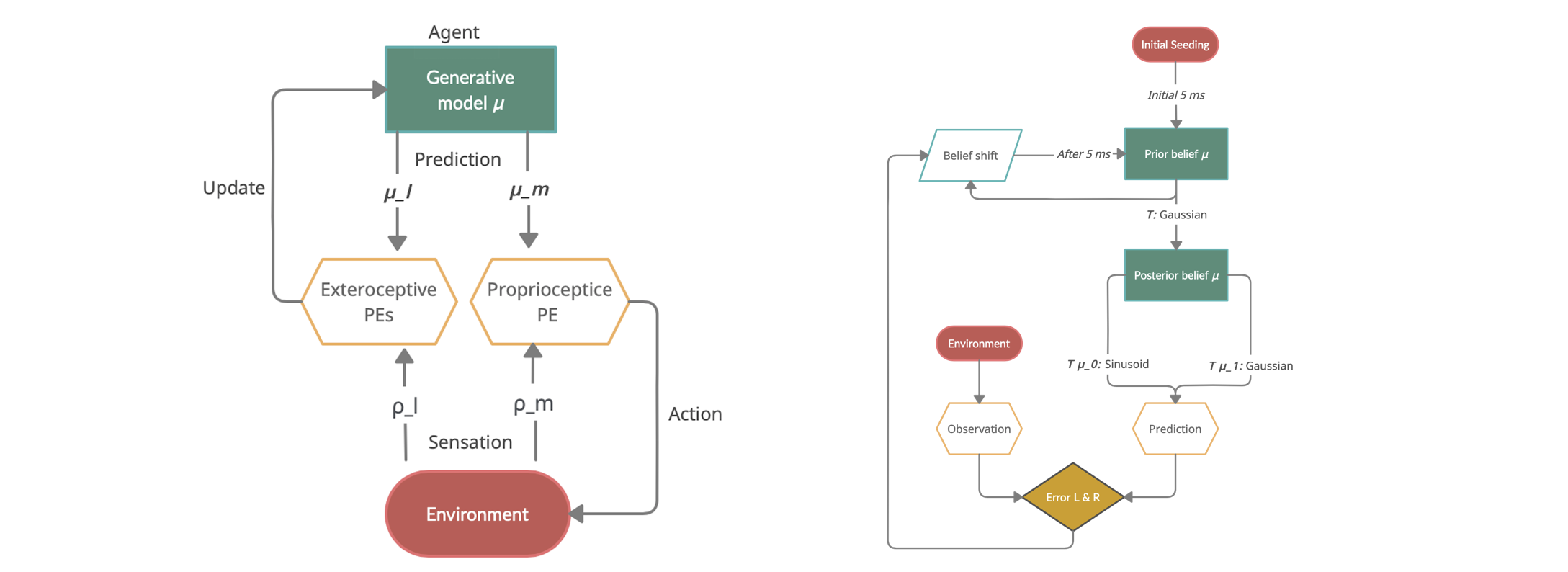
The left image shows the Braitenberg active inference model that we used within the project. On the right an overview of the perception inference implementation using spatially represented probability distributions is displayed. The environment was built using Python, while the actual Braitenberg agents were implemented using the state-of-the-art spiking neural net- work framework, Nengo. As a hardware backend, we made use of Intel’s Loihi chip. The results of the predictive coding approach with a more bi- ologically plausible way of representing probability distributions and the Braitenberg active inference model showed only moderate and unstable performance.